|
Из истории русской морской науки и техники
Русские изобретатели гидроакустических средств
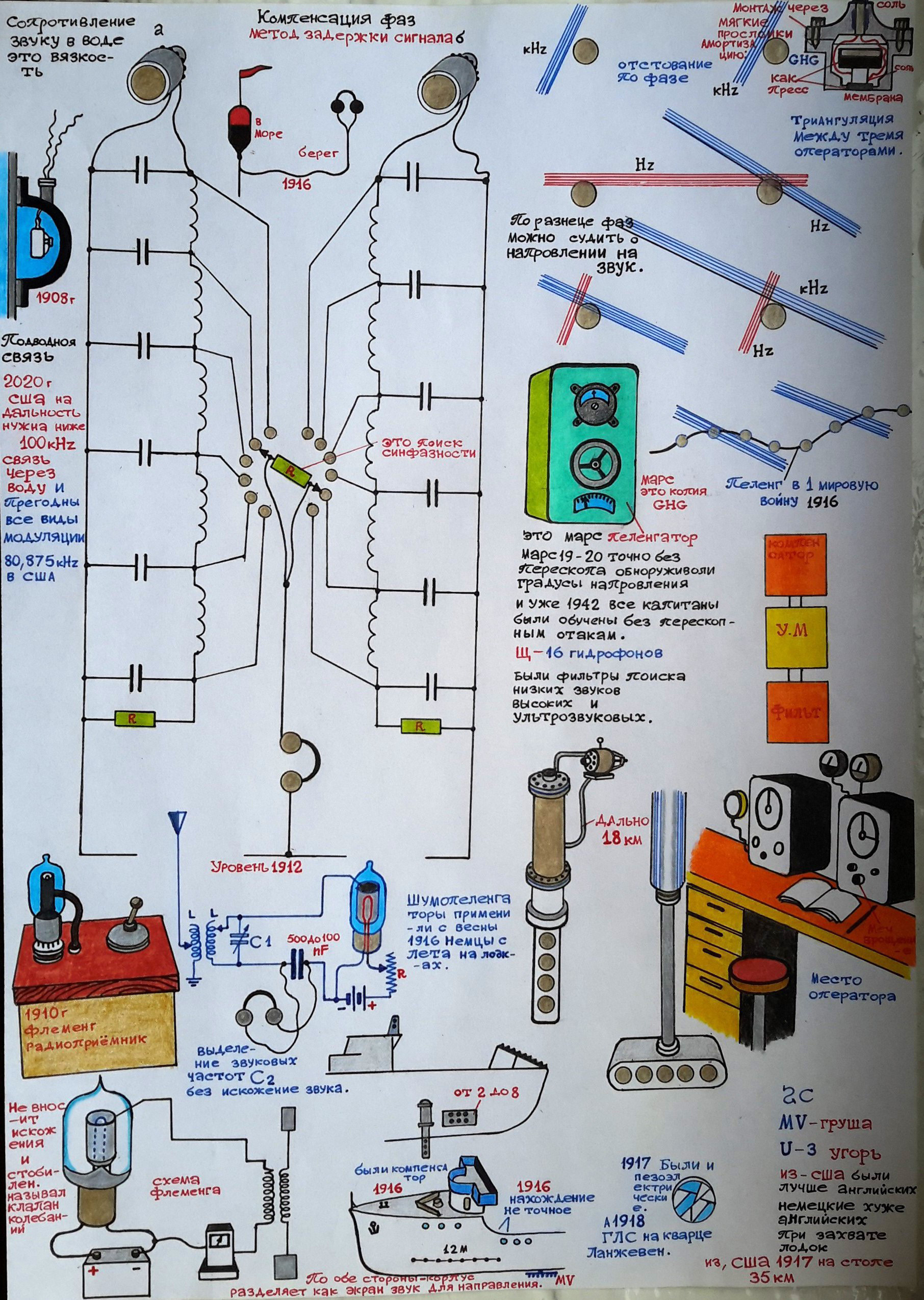
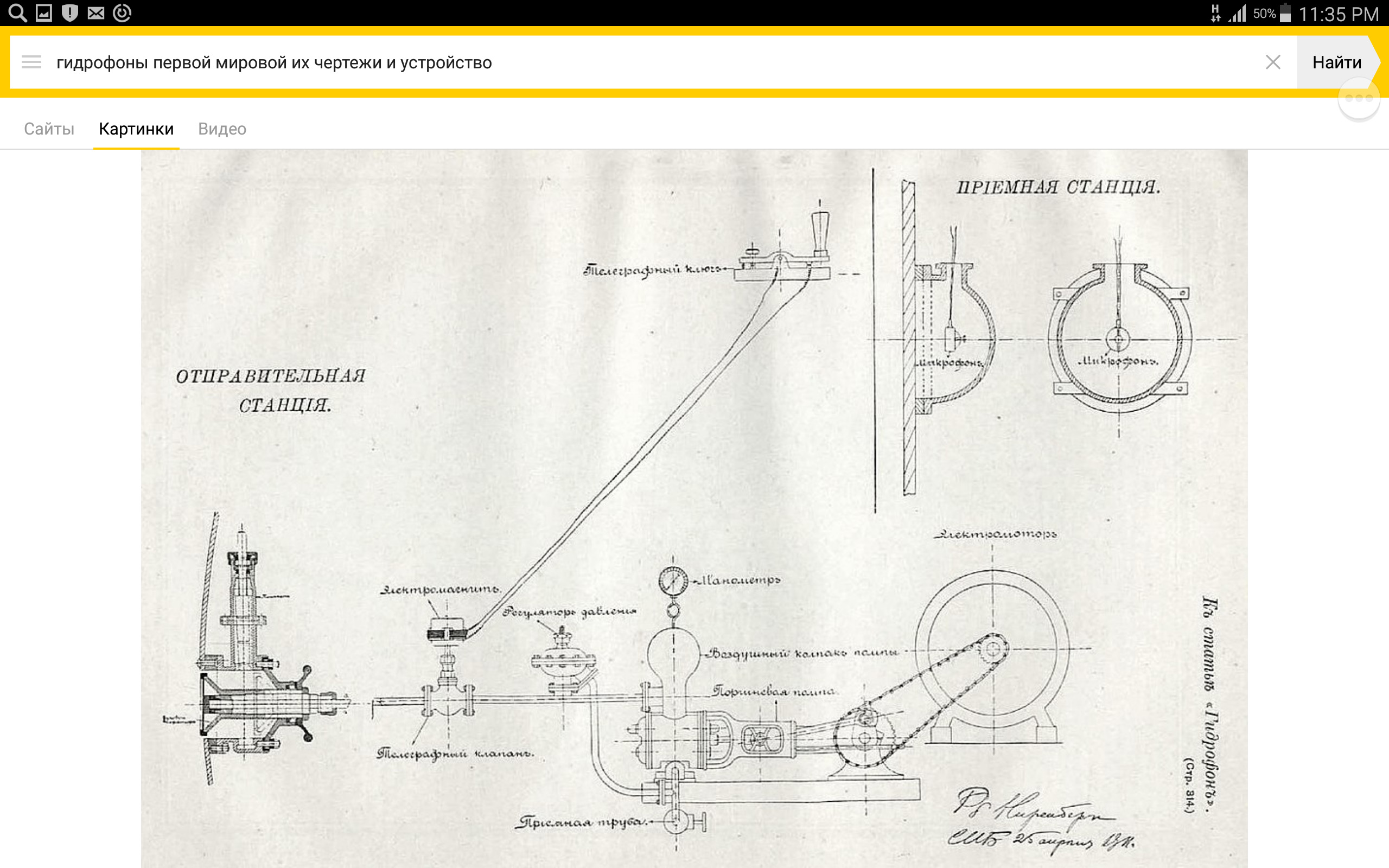
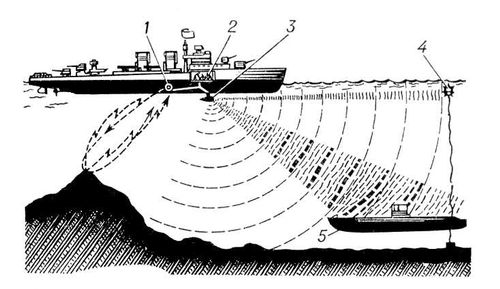
Редко можно встретить современное судно, не оборудованное гидроакустическими приборами. Несмотря на то, что гидроакустика как наука, занимающаяся изучением звуковых явлений в воде, существует очень давно, высокие звукопроводящие свойства последней начали практически использоваться для подводного наблюдения и связи только в XX столетии. Большой вклад в создание первых гидроакустических средств внесли русские изобретатели. Первые опыты в данной области производились в России в 1905 году инженером Р. Г. Ниренбергом на Балтийском судостроительном заводе. Р. Г. Ниренберг применил для этого гидравлическую сирену с одним неподвижным диском и другим подвижным, вращаемым электромотором. Струя воды, подаваемая насосом под большим давлением, поступала в сирену, погруженную в воду, и соответственно числу оборотов подвижного диска давала диск желаемой частоты. Особое устройство позволило телеграфировать по азбуке Морзе, закрывая и открывая доступ воды от насоса к сирене. Вскоре при подводном телеграфировании нашли возможность записывать депеши на ленту. В 1906 г. для такой цели был сконструирован прибор. В 1908 г. в бассейне Морского ведомства проводили испытания первого микрофонно-телефонного приемника, которые дали хорошие результаты. Балтийскому заводу было заказано 10 подобных станций. В следующем году на этом же заводе разработали излучатель с мембраной, вибрирующей под напором струи воды. За рубежом, в частности в германском флоте, излучатели мембранного типа стали применяться значительно позже, однако немецкий ученый Эйгнер в книге «Техника подводной связи», вышедшей в 1922 г., заявил о своем «приоритете» в изобретении подобных приборов. В 1910 г. велись работы по установке гидрофонических приборов на линейных кораблях Черноморского флота «Три святителя», «Пантелеймон» и двух подводных лодках. Спустя полтора года, производили испытания таких приборов на Неве, которые прошли успешно. Комиссия пришла к выводу, что станция удовлетворяет своему назначению и может быть использована в открытом море на дальности свыше двух миль. Испытания аналогичных приборов производились и в Ревеле на подводных лодках. При этом впервые был применен чечевицеобразный приемник, буксируемый на тросах. Подобная конструкция оказалась необходимой потому, что на ходу создаются звуковые помехи от обтекания водой корпуса судна. В приемник же такой формы лучше слышно, так как на него менее влияет шум воды. При разработке приемной аппаратуры гидрофонических станций возникли большие трудности. Надо было в максимальной степени уменьшить помехи, которые возникали на ходу от шумов собственных механизмов и обтекания водой корпуса судна. В 1913 г. работники Балтийского завода изобрели мечевые приемники, удачно разрешавшие указанную проблему. Они имели обтекаемую форму, поэтому завихрений воды не образовывалось вокруг них. В 1913 г. испытывалась гидрофоническая станция с мечевыми приемниками Балтийского завода. Комиссия находилась на борту парохода «Балтиец», где был смонтирован такой приемник. Несмотря на шум от своих машин и проходящих мимо судов, сигналы отправительной станции были все время хорошо слышны как при удалении «Балтийца» от нее, так и при поворотах. Испытания показали, что новая конструкция гидрофонического прибора системы Балтийского завода обладает настолько высокими качествами, что может быть принята на вооружение флота для целей подводной сигнализации в боевых условиях. В докладе по Морскому министерству за 1913 г. было сказано, что «вследствие большого значения подводной сигнализации предполагается при благоприятных результатах этих опытов снабдить все большие суда приборами системы Ниренберга, имеющими перед иностранными системами то существенное преимущество, что ими можно пользоваться и для переговоров между судами, идущими в кильватерной колонне». Однако в дальнейшем чиновники царского флота, преклоняясь перед иностранной техникой, не дали претворить в жизнь смелые начинания талантливого русского изобретателя. Несмотря на то, что отечественные гидроакустические установки, изготовленные на Балтийском заводе, превосходили заграничные, Морское министерство заказало американской фирме 55 приборов подводной сигнализации. И монтаж на судах был передан в руки американских специалистов, которые в целях наживы специально затягивали работу. В итоге русский флот не имел гидроакустической станции связи в течение всей первой мировой войны. Помимо создания гидроакустических приборов для судов, русские инженеры работали в области звукоподводной сигнализации для маяков. В 1911 г. техник Главного гидрографического управления Ерш предложил для маяков подводный колокол, построенный на свои средства. Им можно было пользоваться, чтобы подавать сигналы с постоянной характеристикой, а также вести переговоры. Колокол мог действовать автоматически и при обслуживании вручную, превосходил заграничные образцы. Следует отметить также изобретение русского моряка А. Щенсовича, который разработал радиоакустический метод определения места судна вблизи берегов при плохой видимости. Для этой цели использовались уже имевшиеся на судах радиоприемники и гидрофоны. На береговой станции устанавливались радиопередатчик, гидроакустический излучатель и специальный синхронизатор для одновременной посылки радио- и гидроакустических сигналов. Метод определения места судна был основан на разности скоростей радио- и гидроакустического сигналов. Считалось, что радиосигнал доходит до судна практически мгновенно, а звук распространяется в воде со скоростью 1500 м/сек. По запаздыванию гидроакустического сигнала относительно радио определялось расстояние от судна до передающей станции, причем точность была гораздо большей, чем при визуальном определении. Таким образом, к началу первой мировой войны в России была изобретена и испытана дальномерная (круговая) радионавигационная система, в которой из-за отсутствия в те времена импульсной радиотехники применялась гидроакустика. Русский инженер К. Шиловский в 1912 году предложил прибор, основанный на посылке ультразвукового луча, его отражении встречным препятствием и затем приеме. Первоначально эхолокатор К. Шиловского предназначался для нахождения плавающих льдин и предотвращения столкновения с ними судна. Во время первой мировой войны возникла идея использовать гидролокатор для обнаружения немецких подводных лодок. Однако в условиях царской России оказалось невозможным провести исследования, и К. Шиловский был вынужден переехать в Париж. Практически свою идею К. Шиловский осуществил совместно с известным французским физиком П. Ланжевеном. Она заключалась в том, чтобы возбудить цилиндрический слюдяной конденсатор высокочастотным звуковым генератором, создающим колебания такой частоты, при которой звук не слышим для невооруженного уха. Посылаемый луч доходил до подводной лодки, отражался от нее и возвращался обратно. По времени возвращения звука определялось расстояние до подводной лодки, а направление луча являлось ее пеленгом. Успешные работы наших соотечественников над созданием различных гидроакустических средств свидетельствуют о том, что русская научная мысль в этой области опережала зарубежную. И только косность чиновников царского флота, их низкопоклонство перед заграницей, продажность, а порой и просто предательство не давали возможности претворять в жизнь смелые начинания талантливых русских людей.
Е. Шошков, инженер-капитан III ранга
Музейные фото и рисунки из Интернета от Романа Морошкина
|